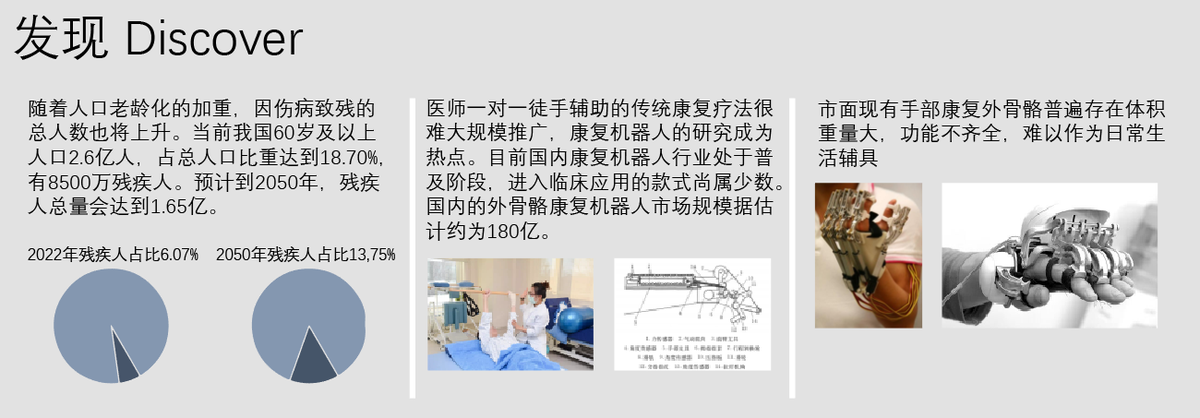
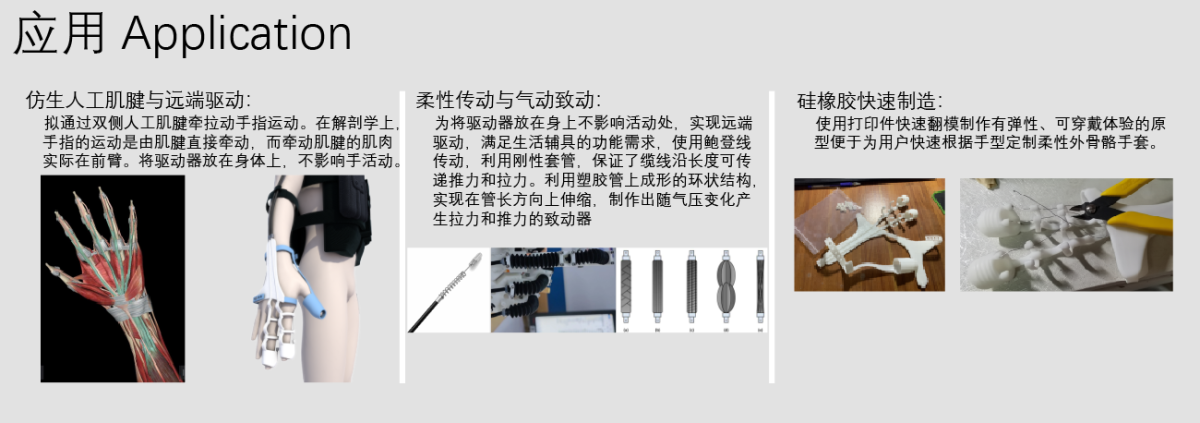
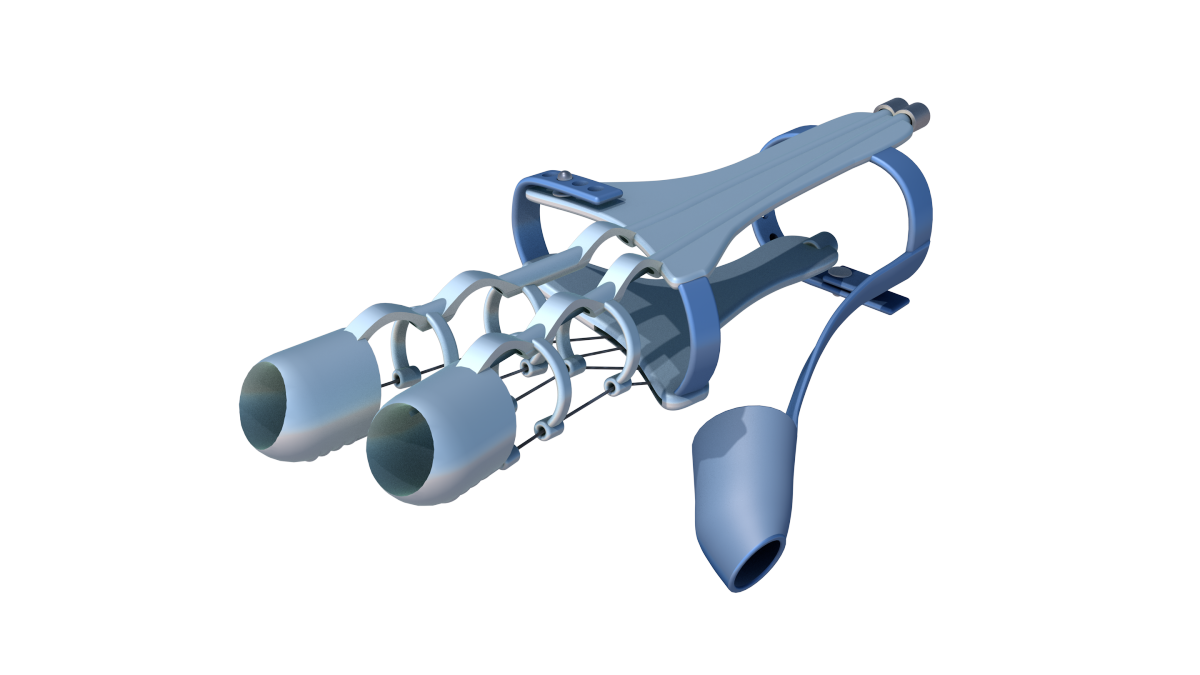
手功能康复的外骨骼设计
原创
医疗器械
2022届本科毕业设计作品·
毕业展·
湖南大学设计艺术学院·
康复·
辅具器械
0赞|0评论|813人气|0收藏|2022-07-09 12:45:13
关注
私信













 沪公网安备 31011502009179号
沪公网安备 31011502009179号
留言板(0)