 点评此图
点评此图
 点评此图
点评此图
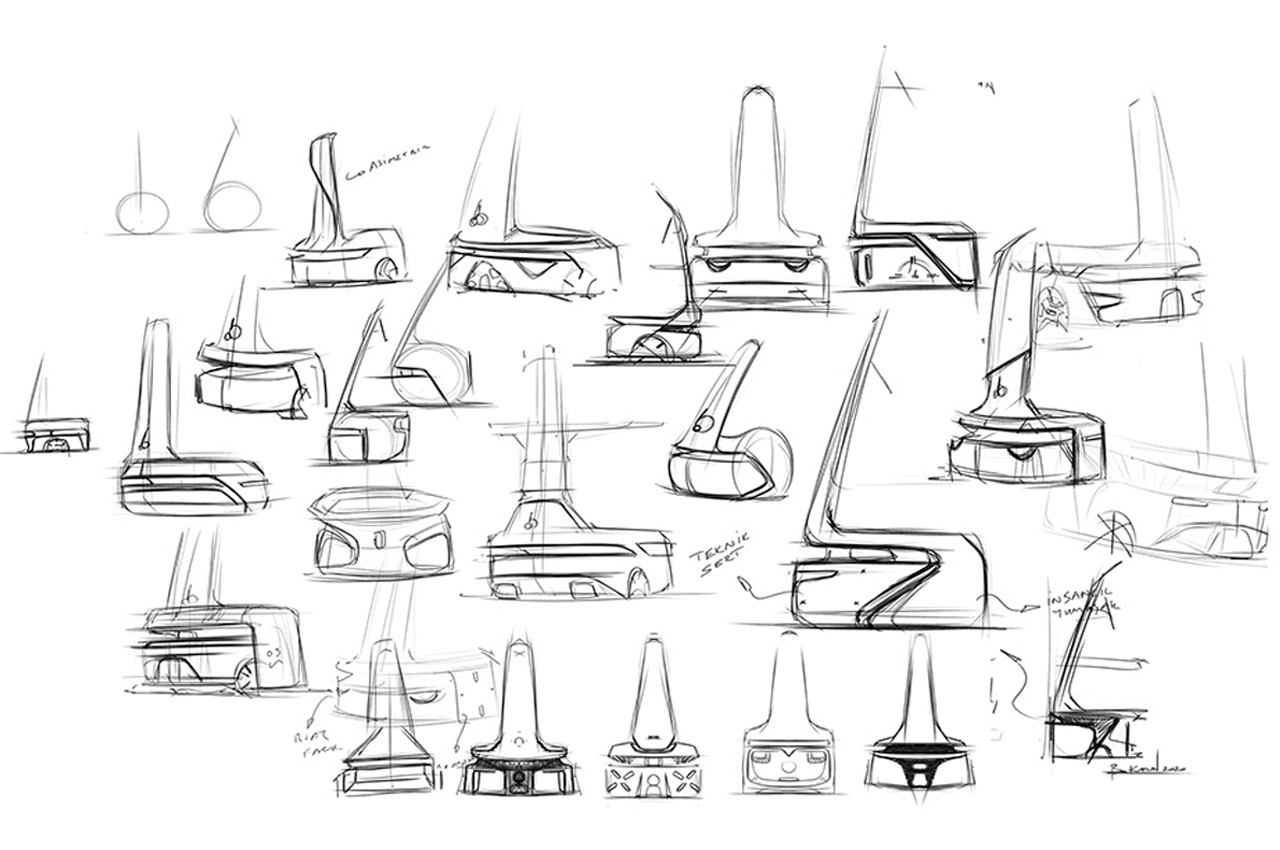
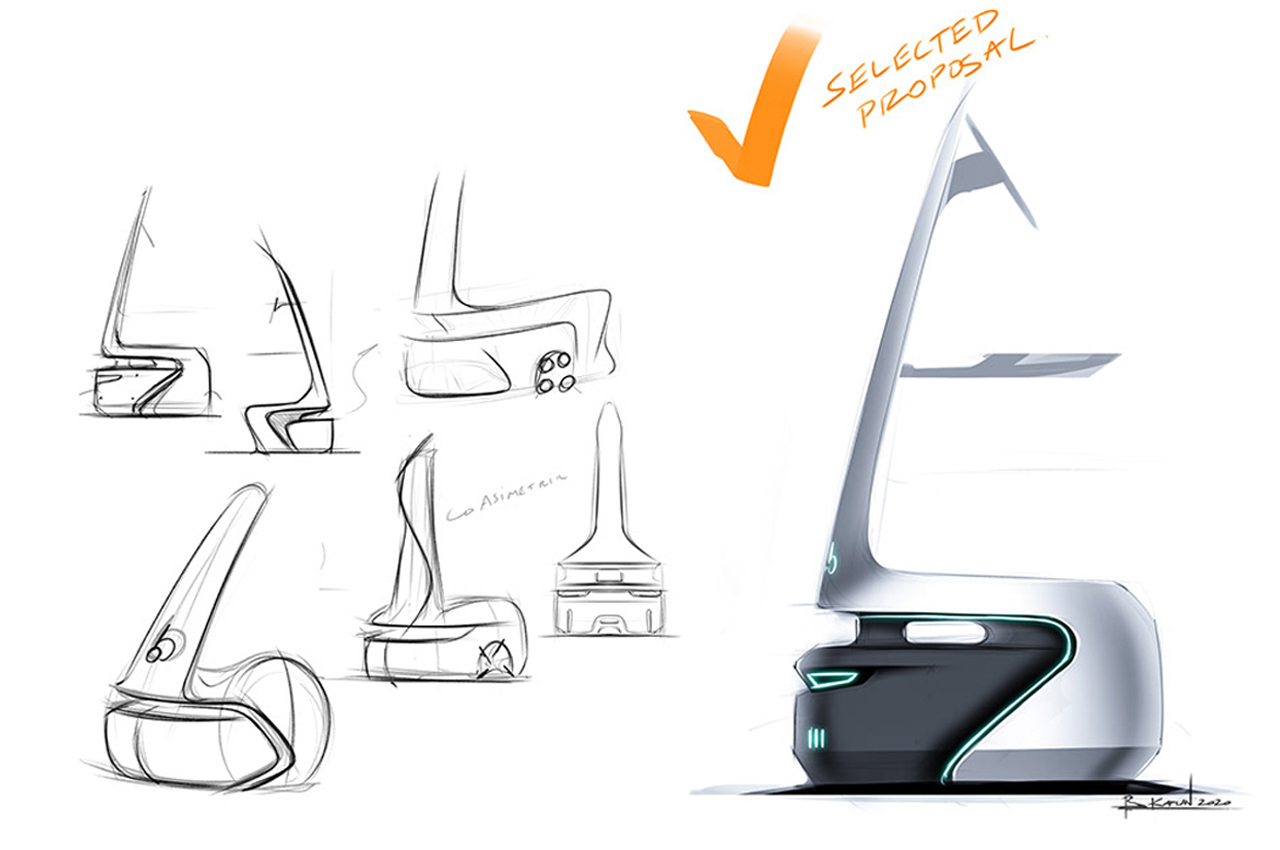
在概念设计阶段的开始阶段,卡普兰首先进行了自己的研究,以确定机器人的整体情绪和个性。在研究期结束后,卡普兰坐下来勾画他正在开发的机器人的轮廓,兼具实用元素和美感。
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
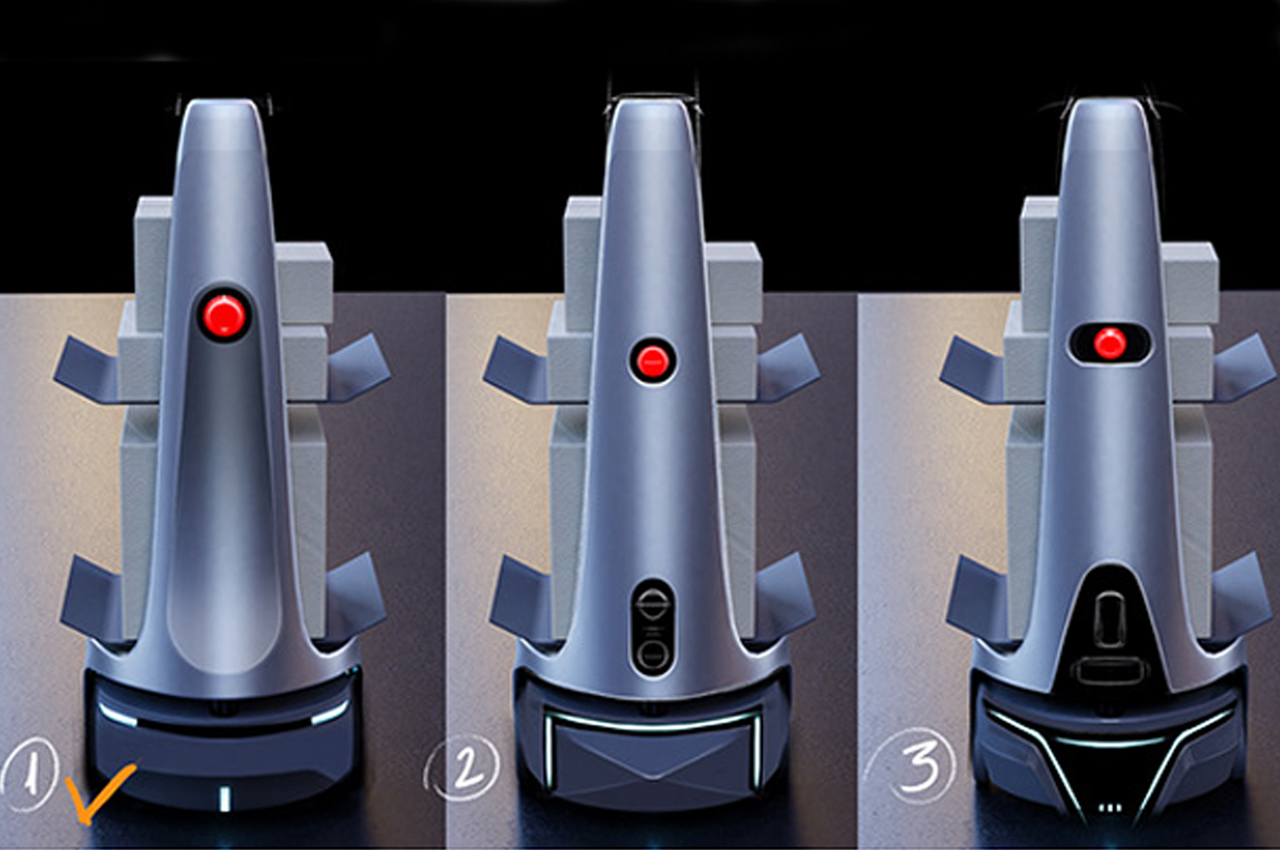
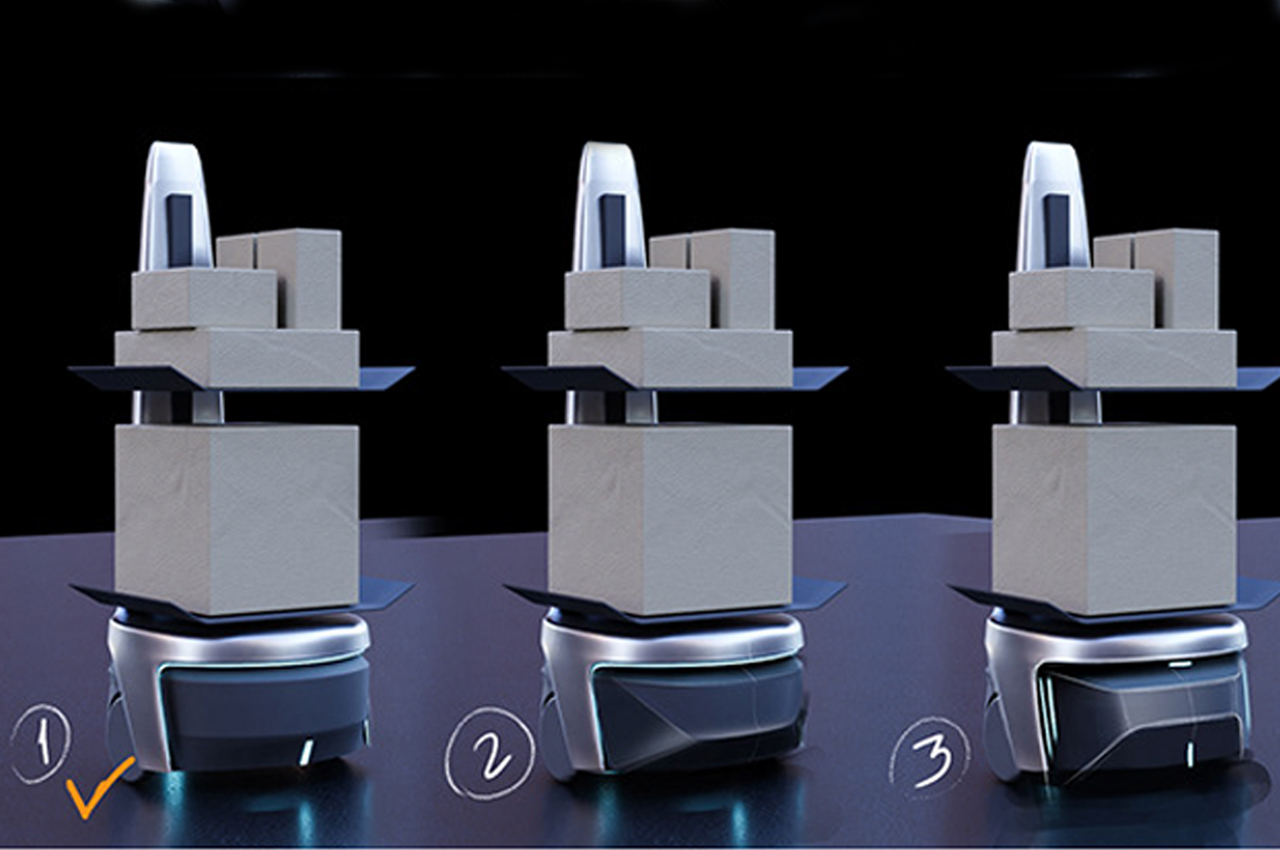
第一个建议在坚固的外部和内部找到耐用性,而 Kaplan 的第三个建议将机器人包裹在柔软的外壳中,以覆盖机器人柔软的内核。Kaplan 和 OTTOBO Robotics 最终选择了第二个提案作为概念设计的最终形式,该机器人具有柔软的外壳和坚硬的内核,可提供缓冲的触觉体验,为机器人配备友好且平易近人的性格。
 点评此图
点评此图
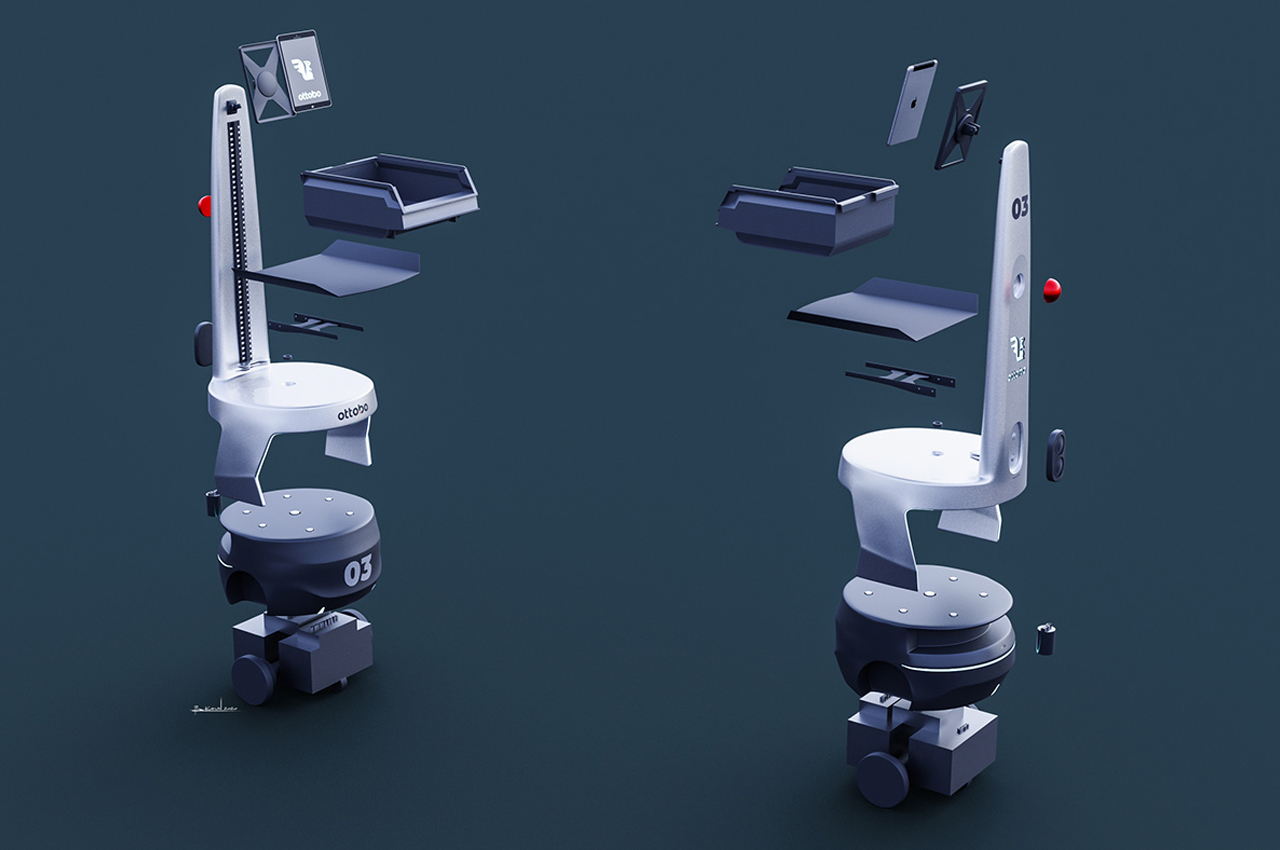
一旦 OTTOBO Robotics 团队和 Kaplan 选择了最终的概念形式,就会创建 3D 模型以从各个角度进一步开发机器人。使用机器人的 3D 模型使 Kaplan 能够找到优化机器人人体工程学和包装灵活性的最佳方法。在这个阶段,为机器人选择了更多的技术规范,更具体地解释了如何将智能技术内置到房间中以确保其可操作性。在这个概念设计阶段之后,Kaplan 和 OTTOBO Robotics 团队期待着未来的生产。
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
本作品转载于原创设计师 : Berk Kaplan
举报
15赞 8评论 2794人气

21赞 5评论 3338人气

17赞 2评论 2999人气

21赞 2评论 3010人气


 关注
点赞
收藏
关闭弹幕
留言
关注
点赞
收藏
关闭弹幕
留言
确认要删除该条评论吗?
小小心意,大大鼓励
最高赞赏200元
使用支付宝扫描二维码完成支付
使用微信扫描二维码完成支付
当前余额:¥0.00
支付操作会向你普象账户的注册手机号发送验证码
请注意查收

扫一扫添加
普象商务
扫一扫添加
客服微信

扫一扫下载
手机APP

请关注公众号iamdesign或扫码关注
 沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司
沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司
实际落地了没
是不是还获得过奖呢
什么时候可以实现量产啊